http://d.hatena.ne.jp/high-sai/?of=20
主な設定はHigh-Saiさんの設定でOKかと思いますが、それだけでは近接センサが反応してもArduino側で反応しません。
High-Saiさんのプリンタはメンデルなのでメンデルでは動くのだろうか・・・
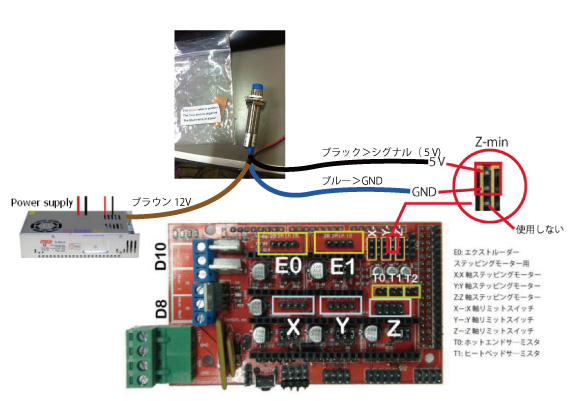
12Vは私は電源から直接取りましたがHigh-SaiさんのようにRampsの予備FAN電源または12V電源からっとってもよいと思います。
一応私の設定です。下記の設定は私のDeltaの設定ですので設定FALSE TRUEが逆の人もいるかと思います。
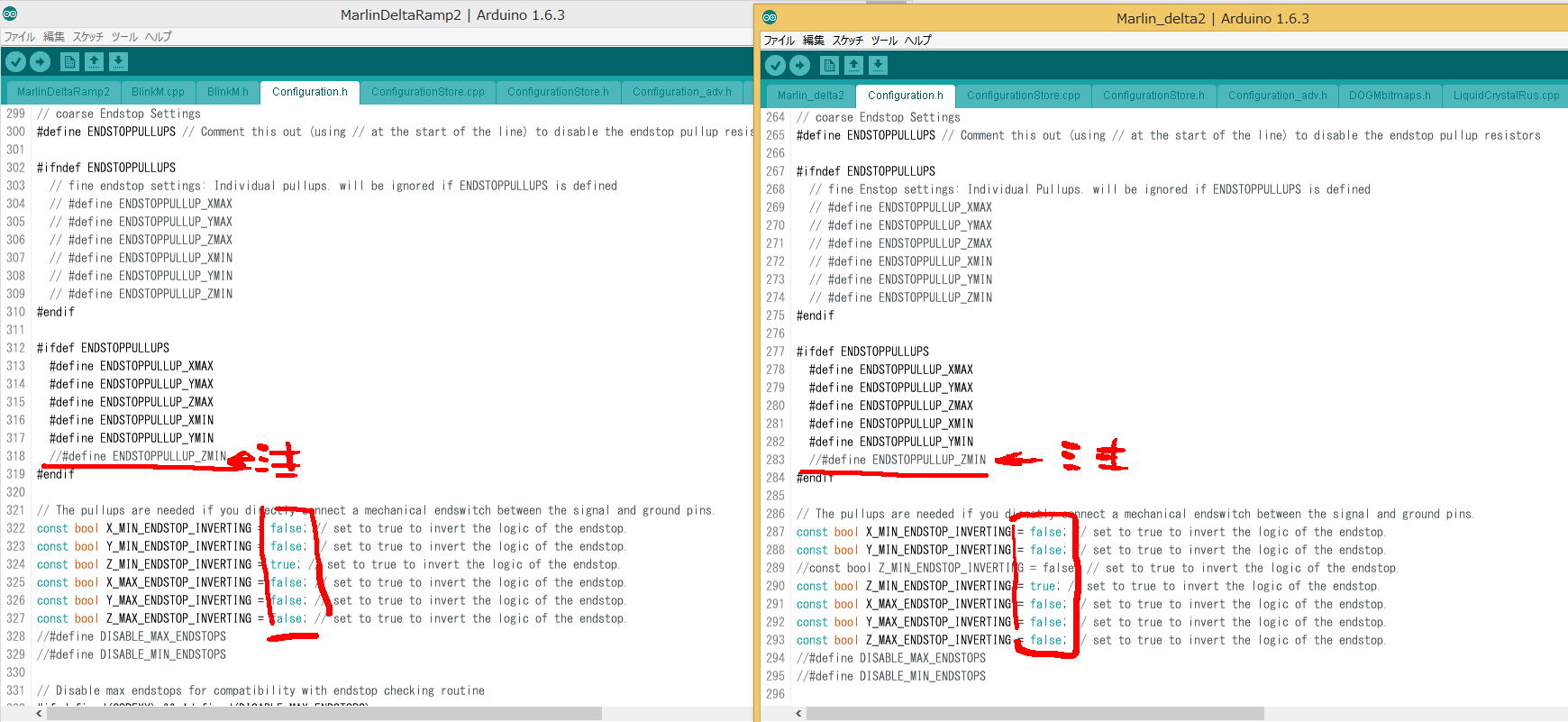
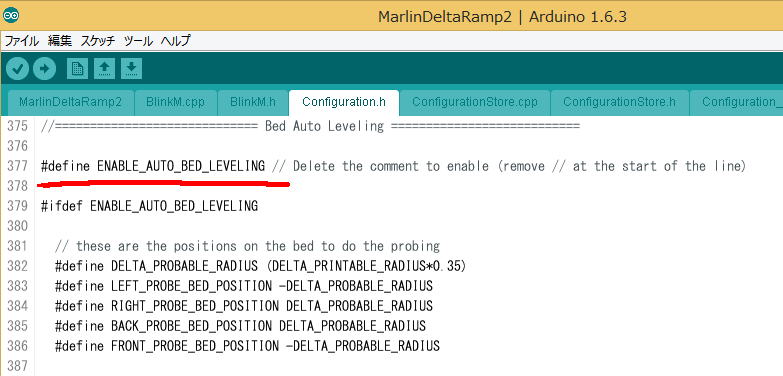
下記の設定でX,Y、ZのMIN MAX ENDSTOP_INVERTINGとAUTO_BED_LEVELINGのコメントアウトだけでは動きません。
PULLUPの設定を変えるといっても
#define ENDSTOPPULLUP_ZMIN
を
//#define ENDSTOPPULLUP_ZMIN
にコメント設定にしてください。下記はコメントした後のスナップショットです。
そうすれば近接センサの反応がArudinoに送られます。
トリガM119で
Z MIN OPEN−>近接センサが反応したときにZ MIN TRIGGERD
にかわればOKです。
かわらなければPullupの設定がコメントアウトのままになってます。コメントにしてください
Arduinoはすみません、1.0.6の昔のArduinoでないとIDEがつながりません、下記はこのコメントを書いているPCにArudino1.6.3が入っていたので・・
また2015年度11月の段階で新しいMarlineが出ているので2つ下に並べておきます。