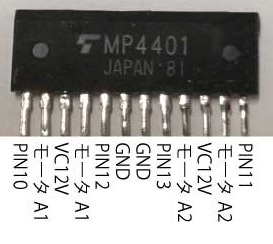
「MP4401」
pin
1 - Arduino digital 10
2 - ステッピングモーター (黄色)
3 - 12V
4 - ステッピングモーター (オレンジ)
5 - Arduino digital 12
6 - GND
7 - GND
8 - Arduino digital 13
9 - ステッピングモーター (茶)
10 - 12V
11 - ステッピングモーター (黒)
12 - Arduino digital 11
パワーMOSFET
MP4401
いままではバイポーラしかつかっていなかったのですが、バイポーラは高速になるとトルクが小さいので、高速でトルクの大きくすることのできるユニポーラ(逆に低速でトルクがすくない、実際は巻き線の関係があるので、一概には言えないらしいですが。)
説明参考 http://www.mechatroidea.com/sekkei-seizu/acutuater/s027-stepping-u-b.html
を扱ってみました。
参考のページは下記とまったく同じにしました。
http://syoshinsyakangeisagi.blogspot.jp/2014/03/arduino.html
Aliexpressで購入 20個18ドルですので1個あたり1ドルちょっと。
https://ja.aliexpress.com/item/MP4401-MP4024-STA472A-TH3L102/32723346451.html?spm=2114.13010608.0.0.Ur1HT7
「MP4401」
pin
1 - Arduino digital 10
2 - ステッピングモーター (黄色)
3 - 12V
4 - ステッピングモーター (オレンジ)
5 - Arduino digital 12
6 - GND
7 - GND
8 - Arduino digital 13
9 - ステッピングモーター (茶)
10 - 12V
11 - ステッピングモーター (黒)
12 - Arduino digital 11
http://akizukidenshi.com/catalog/g/gP-10049/

使ったモータは秋月から大昔に買って、トルクが小さすぎて使えなかった、おもちゃモータです。
・1回転ステップ数:96
・駆動電圧:12V
何も難しくなく、上のPIN配列の通りつなげば問題なく動きます。
問題なのはMP4401の足が短いのでブレッドボードに載せても押さえつけないと通電しません・・・
■1相励磁は角度精度は良いが、同期外れが起きやすく、あまり使われない
■2相励磁は角度精度が少し下がるが1相励磁の倍のトルクが出るので一般的によく用いられる
■中間的な1−2相励磁は、1.8°のハーフステップ(0.9°)駆動により、ジッターが少なく、2相励磁より高トルクで駆動できる。
■通常はパワー系の伝達には2相励磁、搬送ジッターを嫌う検出系では1−2相励磁が使われる。